薛博心,男,2003年11月生, 山西河津人,智能工程学院机械设计制造及其自动化专业2202班(上河书院)学生。为了制作出理想的机器人,薛博心从零开始,历经自学建模、百次修改、推倒重来的淬炼,终于在全国机器人大赛中捧回三等奖。
刚入学时,听到学校竟然有机器人社团,我立即产生了兴趣。再加上自己就是学机械制造的,想着能借此提升专业能力。而学长说的“加入实验室,那里能摸到真家伙,还能参与机器人组装和编程比赛”更让我毫不犹豫地报了名。我想象着自己戴着护目镜在实验室操作精密机床、亲手调试机械结构的场景,觉得这要比窝在宿舍打游戏有意义多了。
从零开始
但听说加入实验室要考核时,我立即傻眼了——别说实操,我连三维建模软件的界面都没见过。看着学长发来的机械图纸,我只觉得像天书一样,根本无从下手。可我实在不想放弃这个机会,于是咬咬牙,在笔记本上写下“两周学会三维建模”的目标,开始用最笨的方法自学。
面对完全陌生的软件操作体系,我摸索出一套“网课+临摹+实践”的学习法。没课的时候,我就抱着笔记本电脑泡在教室,在各大学习平台搜索建模教程。第一次打开网课视频时,讲师快速演示的“拉伸”“旋转”操作让我眼花缭乱,我只能把进度条反复拖回,用手机录下关键步骤,再对照着逐帧模仿。
为了记住每个工具的位置和功能,我把软件界面截图打印出来,贴在笔记本上,用不同颜色的笔标注出常用工具的快捷键,像背英语单词一样反复记忆。
临摹图纸成了每天的必修课。我从最简单的物品开始,比如一个台灯的底座:先在二维图纸上分析它的结构,想象各个部分的立体形态,再打开软件尝试建模。每天临睡前,我都会给自己布置一个小任务,比如把课桌上的水杯画成三维模型,或者根据食堂的餐盘形状设计一个托盘。

有次为了模拟餐盘边缘的弧度,我拿着餐盘在食堂反复观察,用手机拍下不同角度的照片,再对照着调整模型的曲面参数。同宿舍的同学笑我“走火入魔”,但当我看着自己创建的模型越来越接近真实物体时,那种成就感让我顾不上在意别人的眼光。
自学了一段时间后,我就迫不及待找到实验室的学长提出参加考核。
拿到题后前半小时还算顺利,我按照“先主体后细节”的步骤,用拉伸命令画出基本轮廓。
可画到一半,我突然发现模型的关键尺寸标错了,整个结构都偏离了图纸要求。瞬间,我的心猛地一沉,额角冒出冷汗——此时时间已过去六十多分钟,我掐了自己一把,强迫自己冷静下来:“别慌,按步骤来!”
我迅速删除错误步骤,重新对照图纸梳理思路。手指在键盘上快速敲击,眼睛紧盯着屏幕,生怕漏掉任何一个细节。
终于,抢在结束时间前,我完成了考核任务。虽然考核成绩不算很好,但还是进入了实验室。这给了我很大的信心,原来,只要肯付出,肯努力,就有成功的希望。
101次修改
进入实验室后,我满心盼着立刻动手造机器人,老师和学长则建议我先夯实基础,通过参与赛事积累经验。
在数模大赛、工程制图大赛里摸爬滚打了一年后,我终于在大二等来了第 23 届全国大学生机器人大赛的机会。

比赛要求设计一台机器人车,要像插秧能手一样,从育秧架上精准“抓”起秧苗,再整齐地栽到种植区——每成功插一棵就能得 10 分。
团队分工时,队长把机器人的三维建模任务交给了我。我知道这一步至关重要,做不好,后面的组装、调试全都得“卡壳”。瞬间,我觉得肩上压了块沉甸甸的石头。
之后,我像住进了实验室,天亮开门就坐在座位上,对着电脑屏幕推敲建模细节。最初设计夹爪结构时,我参考了往届各大高校的参赛图纸,前前后后画了十几个版本的草图和三维模型,却始终卡在稳定性和灵活性的平衡上:要么是夹爪力度过大,容易夹断秧苗,要么是结构过于松散,压根抓不起来。
电脑回收站里堆满了被淘汰的模型文件,草稿纸上画满了各种角度的夹爪剖面图,那段日子,我连吃饭时筷子都会不自觉地在餐桌上比划出“开合”的手势。

整整一个月,我在图纸上反复推演机械臂的运动参数,不断调整电机的扭矩、转速以及关节的转动角度,总是在“设计—模拟—推翻—再设计”的循环中打转。
不知道熬过多少个凌晨,终于,模型总算通过了力学模拟测试。我几乎是小跑着送去3D打印,忍不住想象着机器人车取苗插秧的画面。
然而当我开始上手组装时,才发现图纸上严丝合缝的结构,到了现实中竟处处是“bug”——明明电脑模拟中转动顺畅,但实际一夹却出了问题,试了十几次秧苗全部断了一半。
我盯着电脑里的设计图,又看看桌上的零件,突然间明白了问题出在哪:电脑里的线条是完美的,但打印出来的零件,每一层堆叠的厚度、每一处转角的弧度,都存在肉眼难以察觉的细微偏差。这些被设计软件自动“美化”的误差,在实际组装时就会被无限放大。

我这才意识到:模型落地,差之毫厘谬以千里,不能有一丁点的“差不多”。于是,我反复测量内侧凹槽的弧度,0.5 毫米、0.49 毫米、0.48毫米……每调整 0.01 毫米,就要重新打印零件测试。当101次后,我看到夹爪终于能让秧苗成活率从30%提到60%了。那一刻,我心中充满了成就感,比拿冠军还让人热血!
拆掉重来
从建模设计到整机联调,整个团队耗了小半年时间。战线拉得太长,所有人都有些疲惫,看着机器人车终于能完成整个流程,我们靠在实验室的椅背上松了口气。
就在这时,国外同类型机器人挑战赛的决赛视频公布了。抱着“对标差距”的心态点开一看,我们微笑的表情瞬间凝固了——人家的机器人动作又快又稳,抓苗插秧一气呵成,像蜻蜓点水一样轻巧,不到一秒就搞定一株。

再看我们的“铁疙瘩”:带着四个大爪子的机械臂又沉又笨,转动起来底盘咯吱响,爪子之间还老打架,抓个苗要犹豫半天,插下去秧苗还东倒西歪。这差距也太大了!
研究过后,我们发现核心问题就出在爪子上。我们起初觉得爪子多抓得稳,但没想到它太沉了!机械臂带着沉甸甸的爪组转动时,整个底盘都会发出齿轮打滑的闷响,再加上四爪360度的旋转,互相之间会出现干扰,抓握面积虽大,但重量是双爪的两倍多,反而让机械臂运行效率大幅下降。
队长思虑片刻,突然一拍桌子说:“全部拆掉!”
我心里咯噔一下。这可是大家熬了无数夜的心血啊,说拆就拆?但看着别人流畅的动作,再看看自家笨重的铁架,心里的不甘盖过了疲惫。如果带着这套“差不多就行”的作品去参赛,或许也能拿个中游成绩,但既然已经站在赛场上了,为什么不拼尽全力?一股不服输的劲儿冲上来:不行,不能凑合!
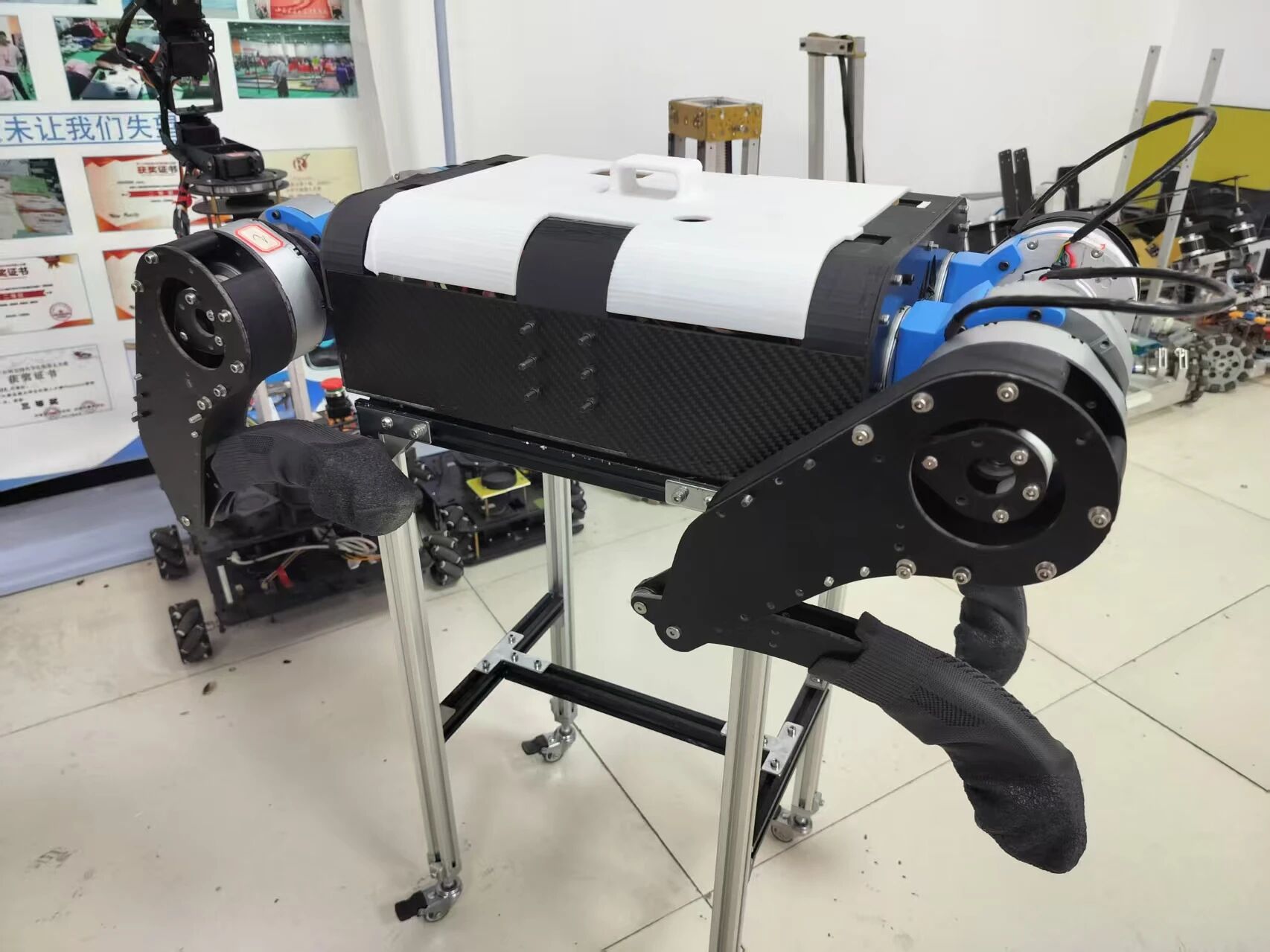
拆掉那套引以为傲的四爪结构后,我们决定用两个更轻巧灵活的爪子,然后就是整体 “减肥”——把底盘换成了更加轻便的新材料,再给机械臂关节“补钙”,换上了更耐磨的轴套。
改造过程比想象的更磨人。为了调一个参数,我常常从早到晚泡在机器旁边,夹爪抓坏了几十株秧苗,每次“咔嗒”一声起落,都听得我心里发紧。测完一组数据,我就抱着笔记本记下来,纸页上满是潦草的数字和画歪的箭头。
眼看比赛越来越近,压力如巨石般压在心头,但没人喊累,大家都憋着一股劲。队长总说“越到最后越要沉住气”。我们白天围着机器转,晚上挤在电脑前看国外团队的比赛视频,一帧一帧扒他们的机械臂运动轨迹。
比赛前一天,数不清第几版的机器人总算成型。它带着未干透的漆痕和临时加固的胶带“上了战场”,虽然还有无法避免的瑕疵,但每个零件都浸着我们的日夜打磨。我们拼尽全力,最终捧回一个全国三等奖。

现在回想起来,那段近乎“拼命”的经历,教会给了我很多东西,专业知识就不说了,尤为重要的,是一种遇到认真求真和遇到难题不退缩的态度——后来我在实验室里调试机械零件、反复推翻重来,靠的也是这股子“死磕到底”的劲头。它让我明白:脚踏实地的积累与坚持才是突破自我的基石。我觉得,尽管这场比赛未必会直接决定我的未来,但让我在按部就班的大学生活里,抓住了一个能让专业理想“落地”的支点。现在我依然每天泡在实验室里,下一场比赛,我想做出一个真正属于自己的机器人!